Graduate Program for Interdisciplinary Converge at GIST Institute of Integrated Technology
[Development of AI-based Creative Intelligence System]
『Realization of customized education for creative innovation based on artificial intelligence and robotics to foster talents capable of satisfying the needs of the Fourth Industrial Revolution』
․ Course to develop creative systems led by each individual for new graduate students
․ Implementation of collective intelligence through collaboration of five groups
․ Realization of customized innovative education that enables hands-on experience based on the key areas of the quaternary economic sectors including artificial intelligence, virtual environment, and intelligent robotics
| Step-by-step education on design thinking | Course details on each step | |
|---|---|---|
| Step 1 Intend |
|
|
| Step 2 Define |
|
|
| Step 3 Explore |
|
|
| Step 4 Explore |
|
|
| Step 5 Explore |
|
|
| Step 6 Explore |
|
|
| Step 7 Explore |
|
|
Robotic system used to move to food

Space where teams can create cooperative systems at the same time
Equipped with various equipment and materials necessary for robot production including drilling machine, 3-axis milling machine, assembly tools, and various tools such as simulator software, motors, and sensors

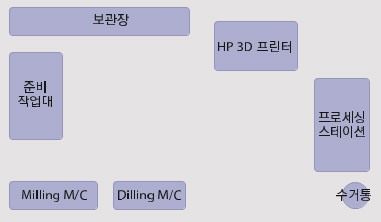


High-speed 3D printer, dust free, 10-20 times faster than existing top 3D printers, and guaranteeing enough strength comparable to existing materials
Processing machines


Auto CAD-based 3D software
AR / VR equipment


※ Various components
Tensor Flow-based AI software: Artificial intelligence platform, Google


UR3, 7-axis manipulators

Saywer, 7-axis robot arm for education



Neurological interface device
